After i was unable to get the thanos board to work properly, i decided to give the kangaroos a try. They are pretty cheap and easy to set up. I also changed the analog feedback sensors to digital quadrature encoders. They are more precise, but need a homeing procedure during start to find their position. So i added seperate limit-switches for the kangaroos.
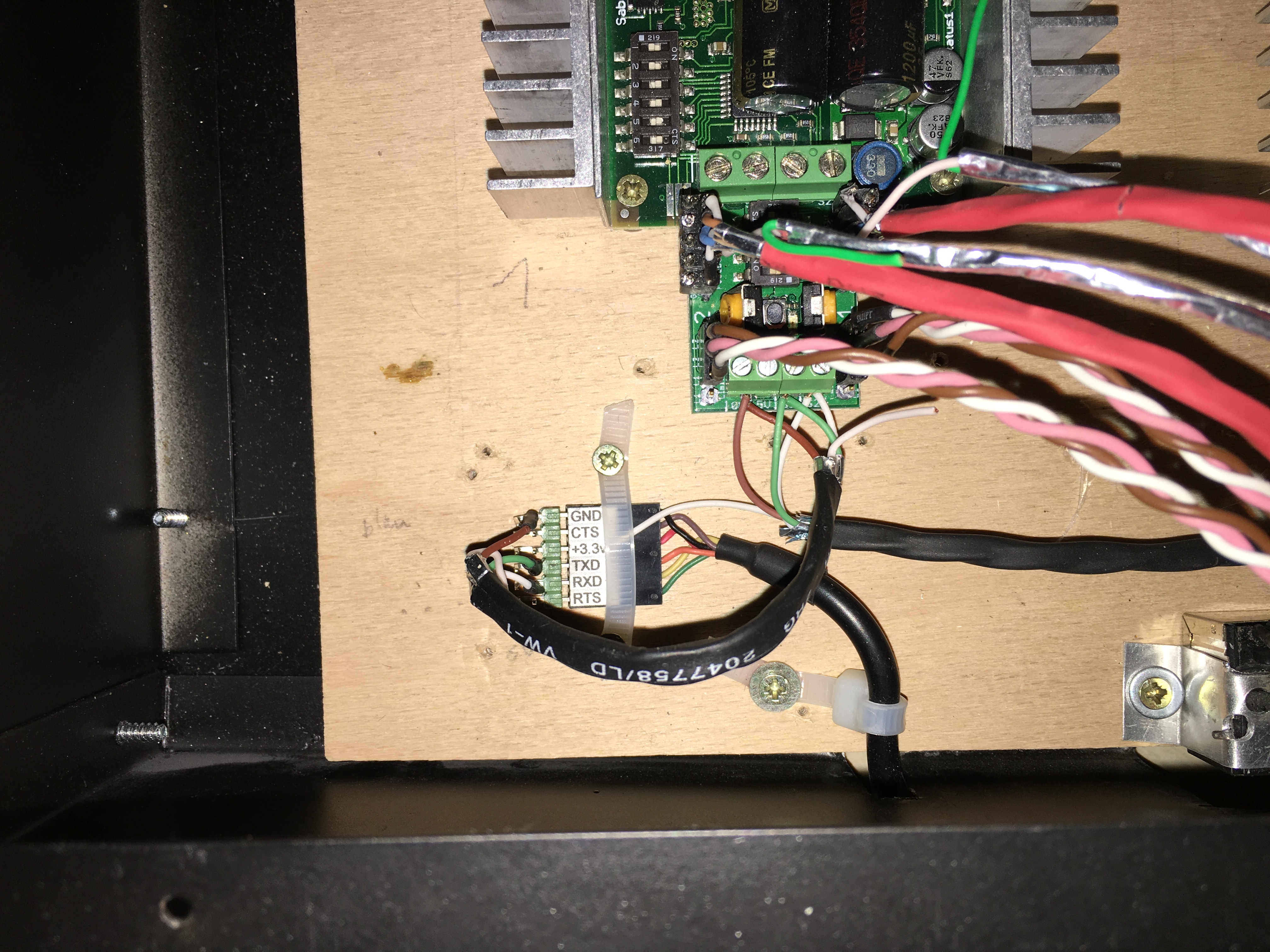
Kangaroo wirings

Mounted digital quadrature encoder feedback sensor.
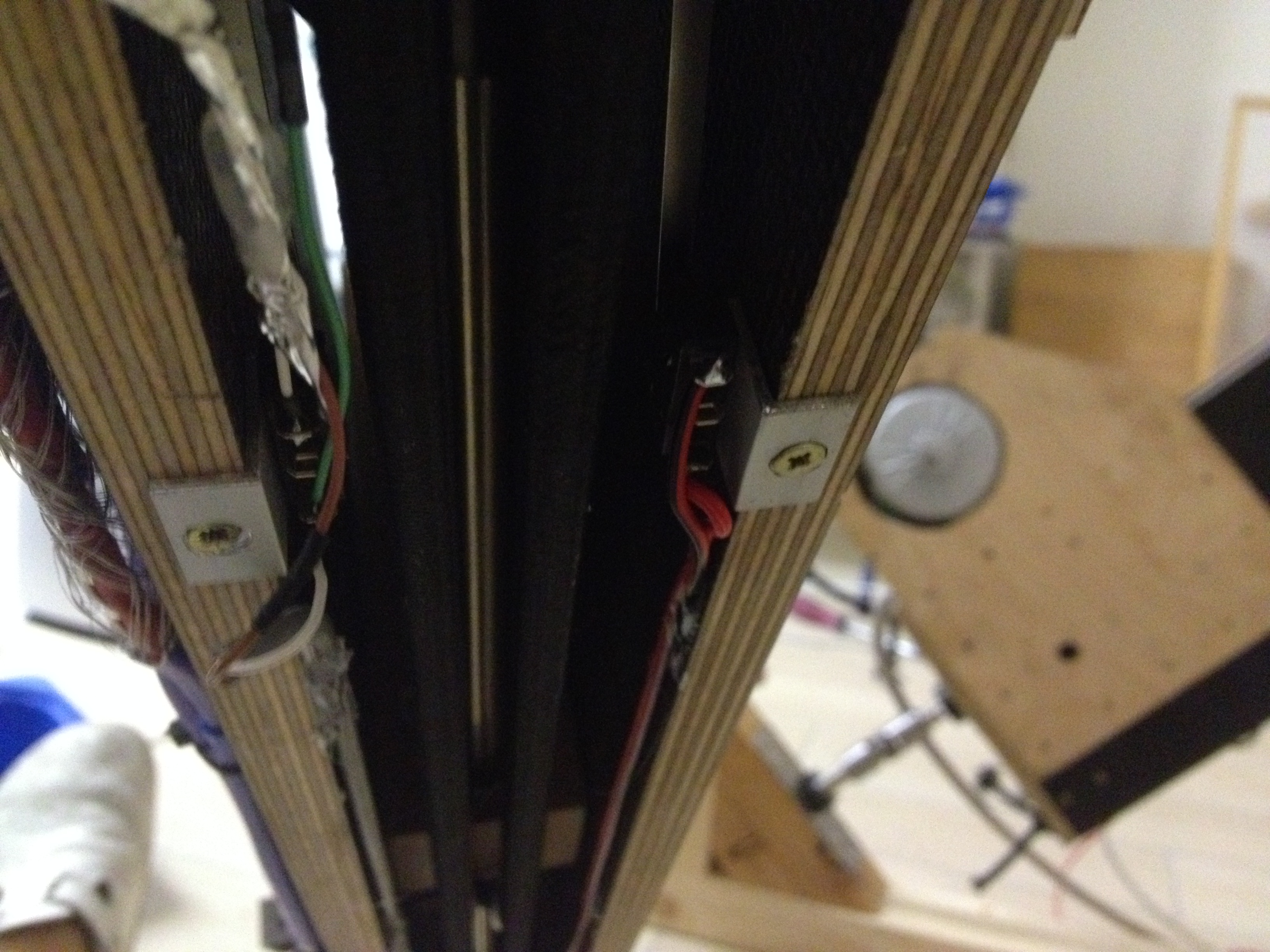
Mounted end stop switches for power off and kangaroos.
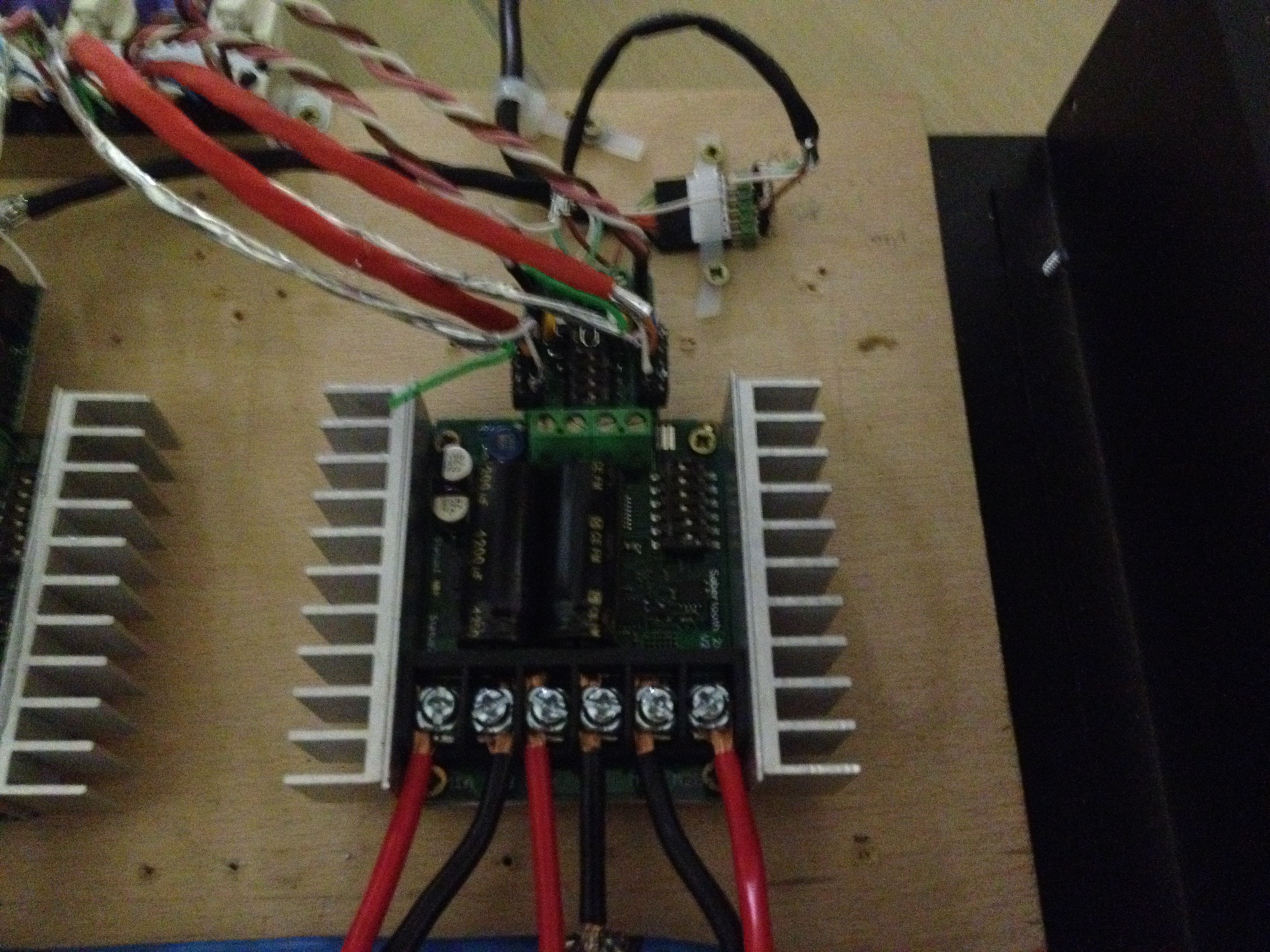
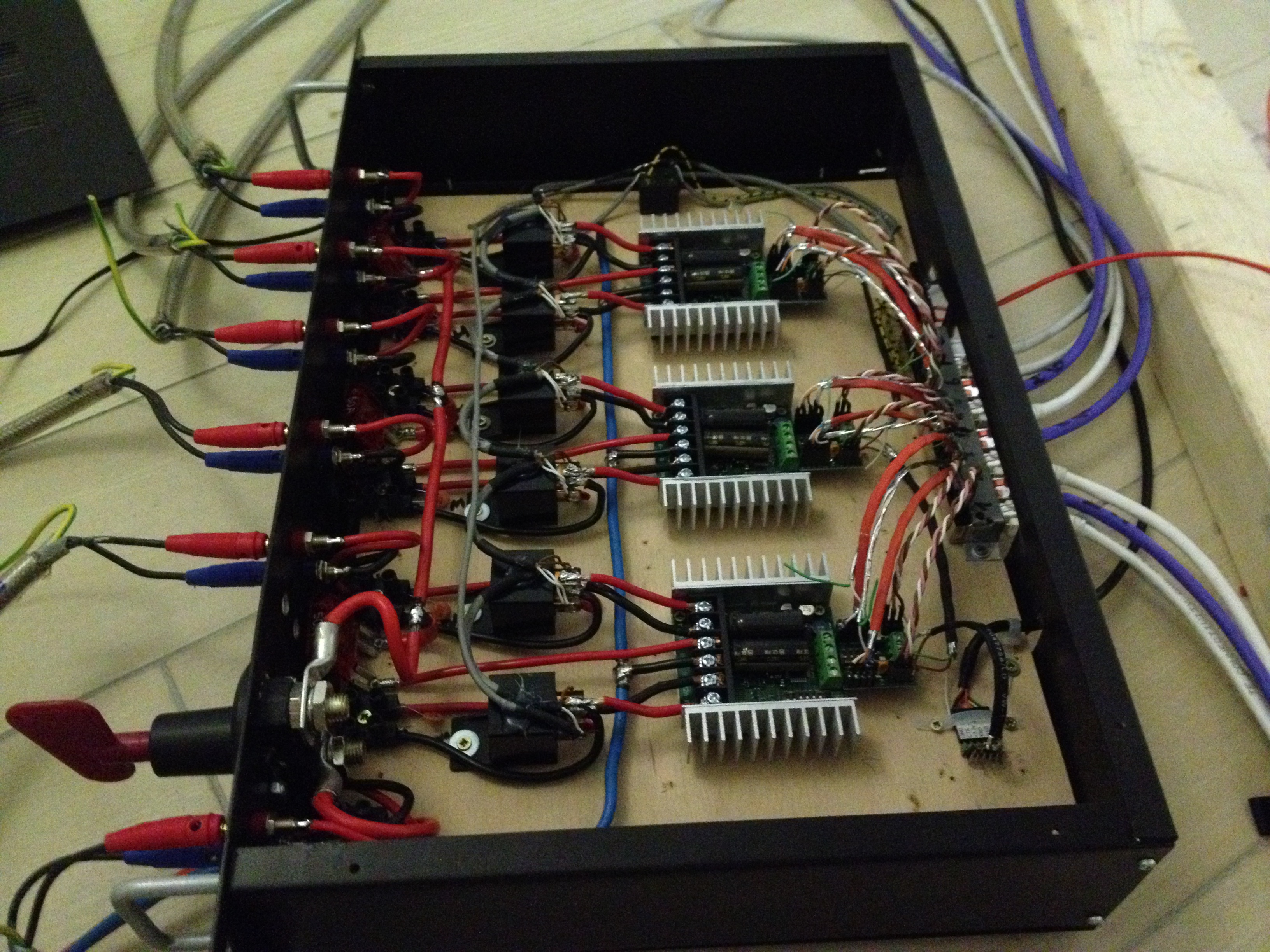
Sabertooth with kangaroo installed
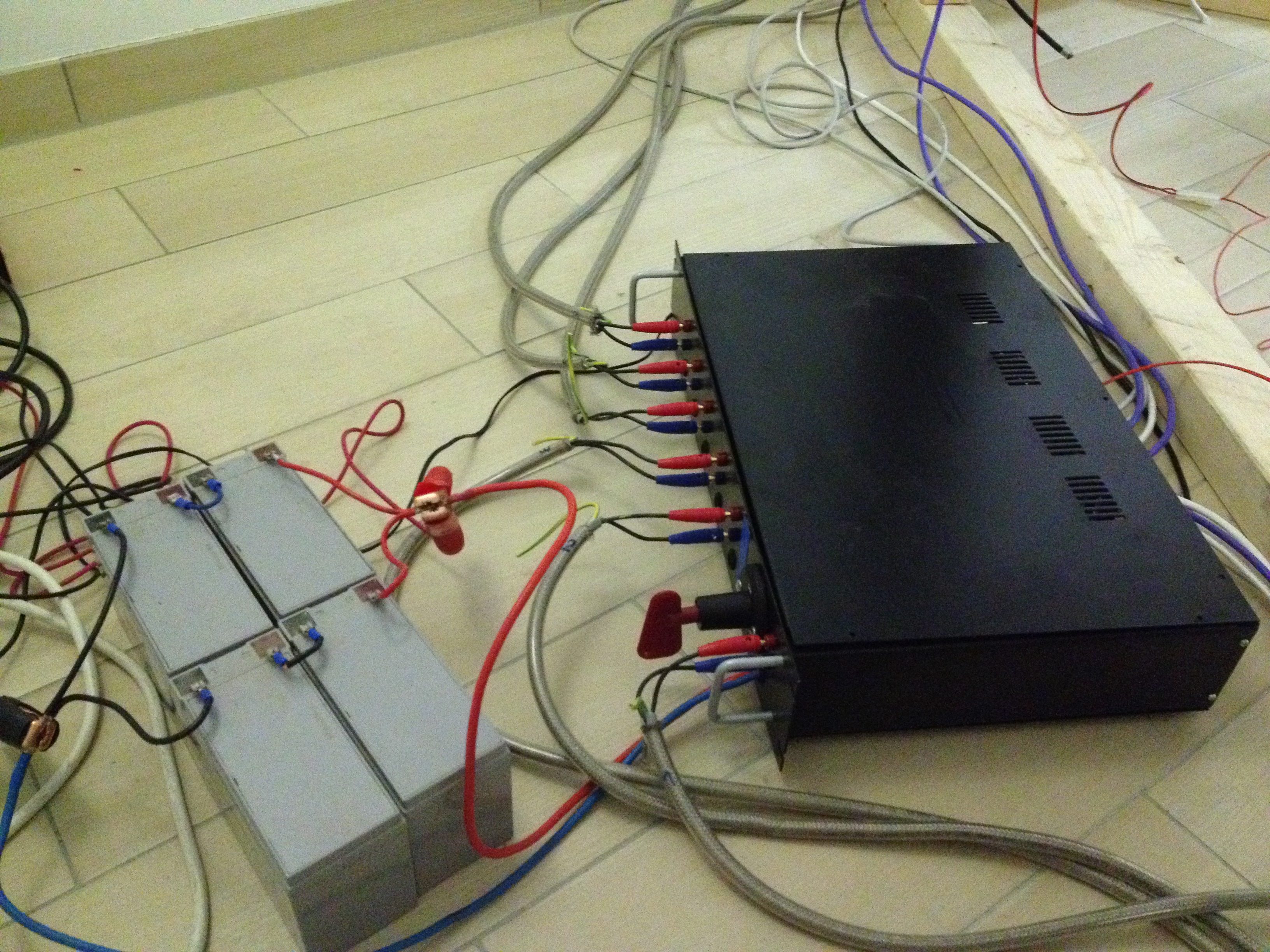
Closed housing for sabertooths and kagaroos. The silver cables are the power cables for the motors.
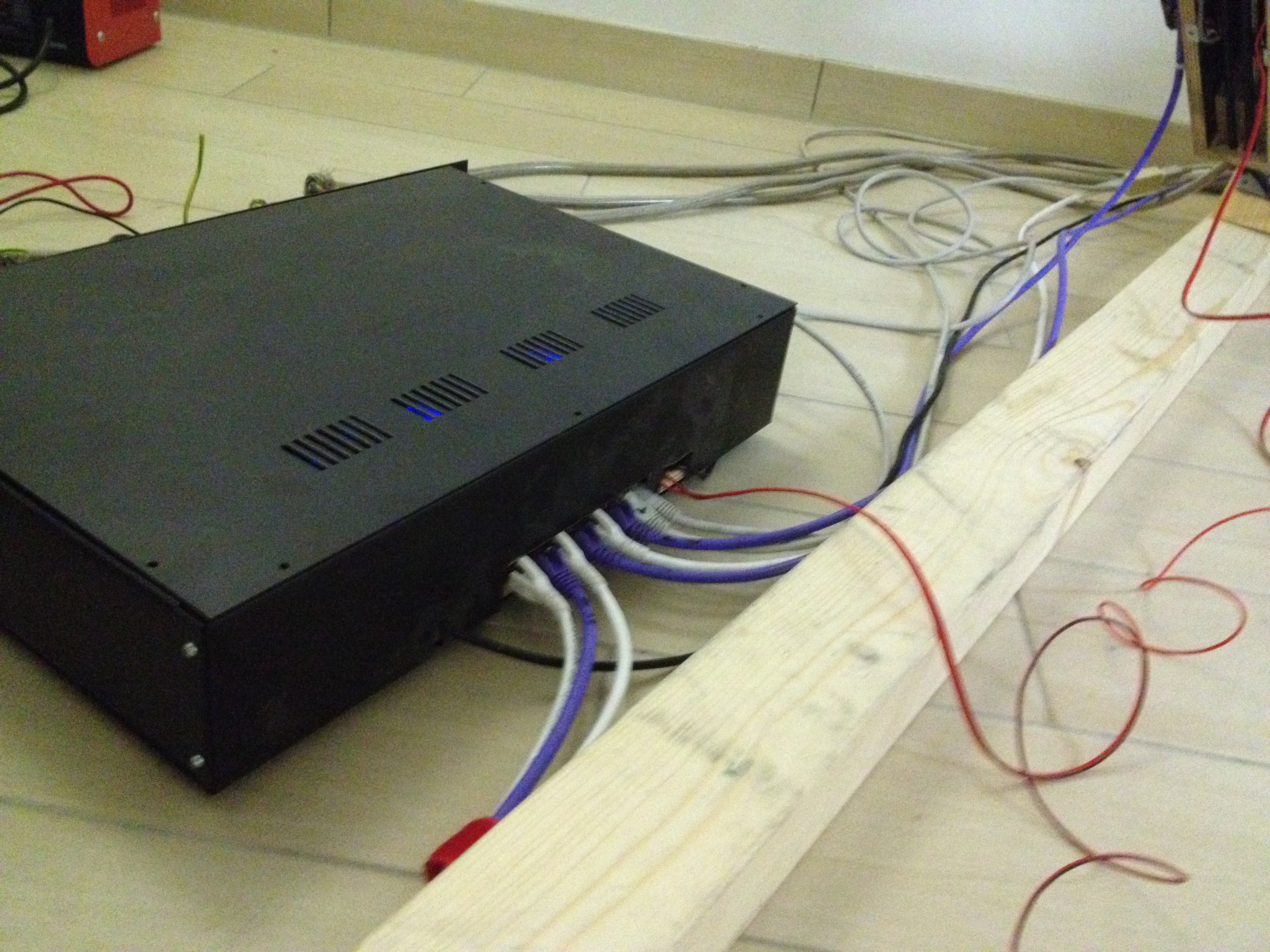
Closed housing for sabertooths and kagaroos. The RJ45 Connections are going to the actuators for feedback and limit switches.
Housing for sabertooths and kagaroos.