On this page i will provide some information about my diy 6dof motion platform, build mainly out of wooden parts. At this time i tried two different ways to get the platform running. The first one was with the thanos board, the second one with the dimension engineering kangaroos. See right-below for the results. The movement of the platform is driven by BFF 6DOF driver for fsx/prepar3d. The actuators are mainly based on Ians BFF design, but i made a lot of improvements and changes. I used different motors (unite motors MY1016 350W, 24V, 9,47NM), added a special motor housing, bungee balancing, bigger actuator housing, and so on... The motor controllers are sabertooth 2x25. The platform provides enough power to lift up 200-300kg which will be good for a good motion platform. The roll and pitch angels are not extremely high, but it should be enough for a good impression of movement. The actuator speed should be approximately at 60 cm/sec, enough speed for simulation. For the Oculus Rift DK1 i used vireio perception and opentrack to track the movement of the rift. For the Oculus Rift DK2 i used prepar3d and DCOC-Extension. I also did some tests to get a full 6DOF headtracking on the Oculus Rift DK1 with arcuo. I also did tests with flyinside fsx. Its a great kickstarter project. Please support it.
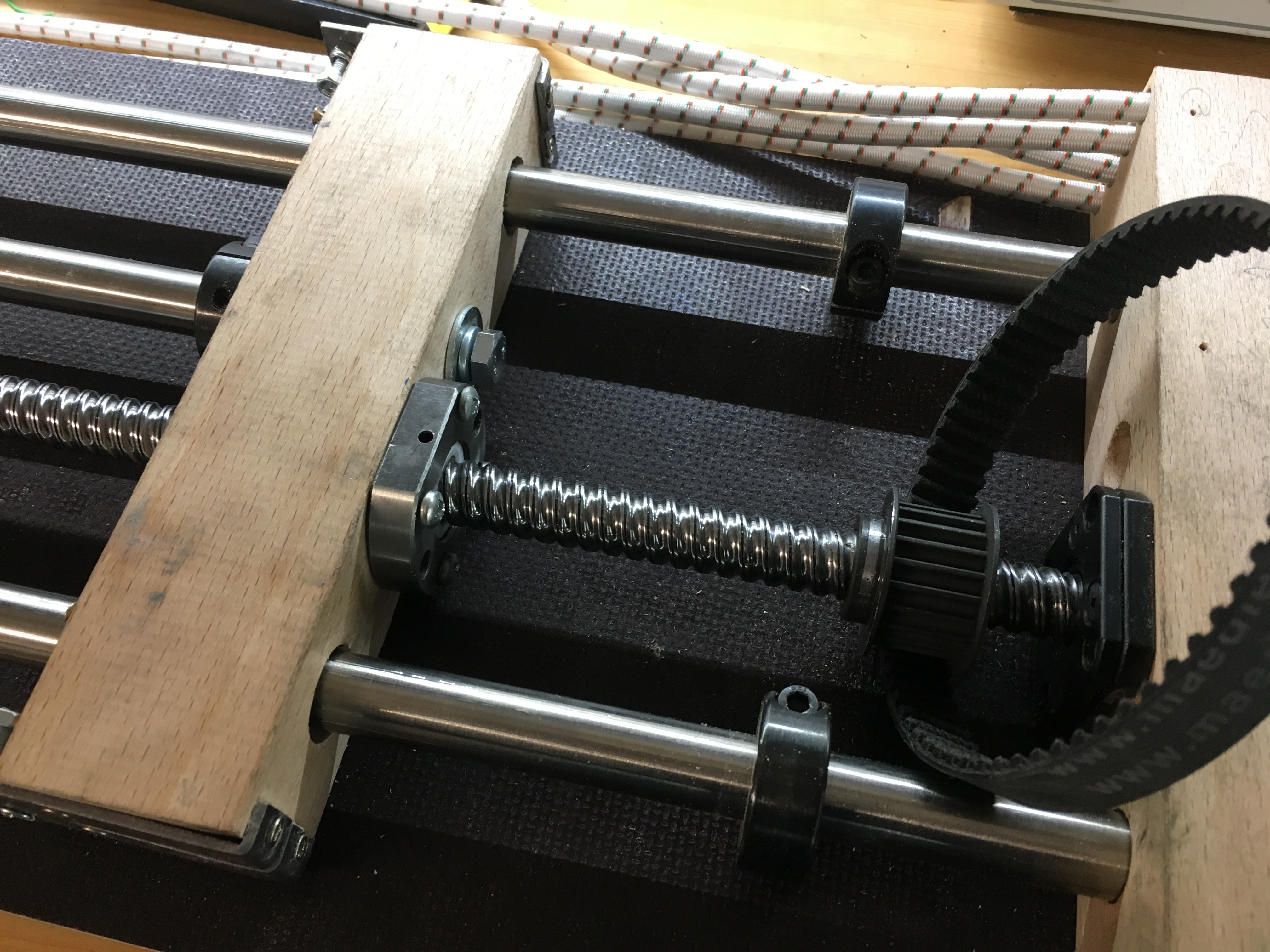
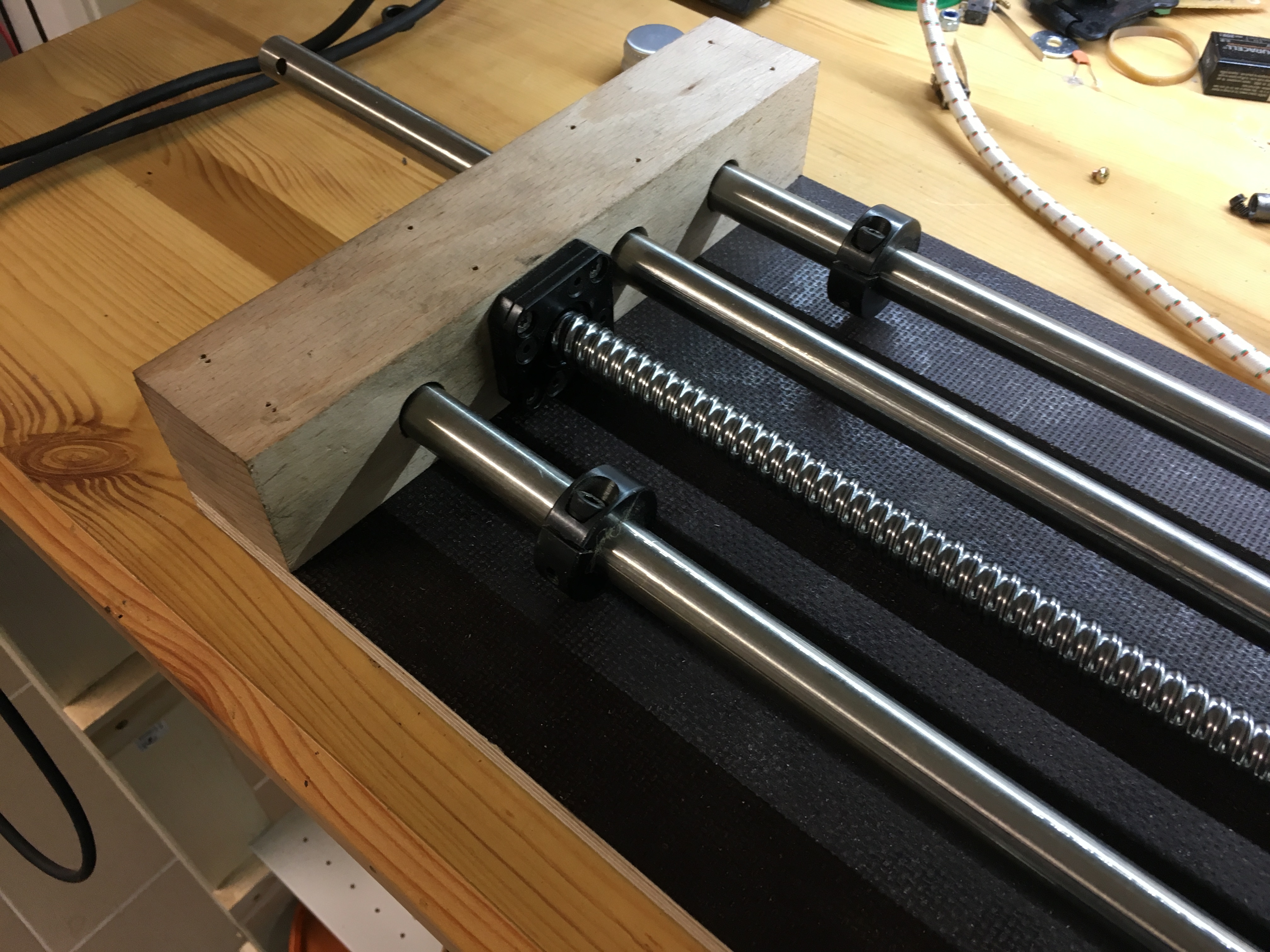
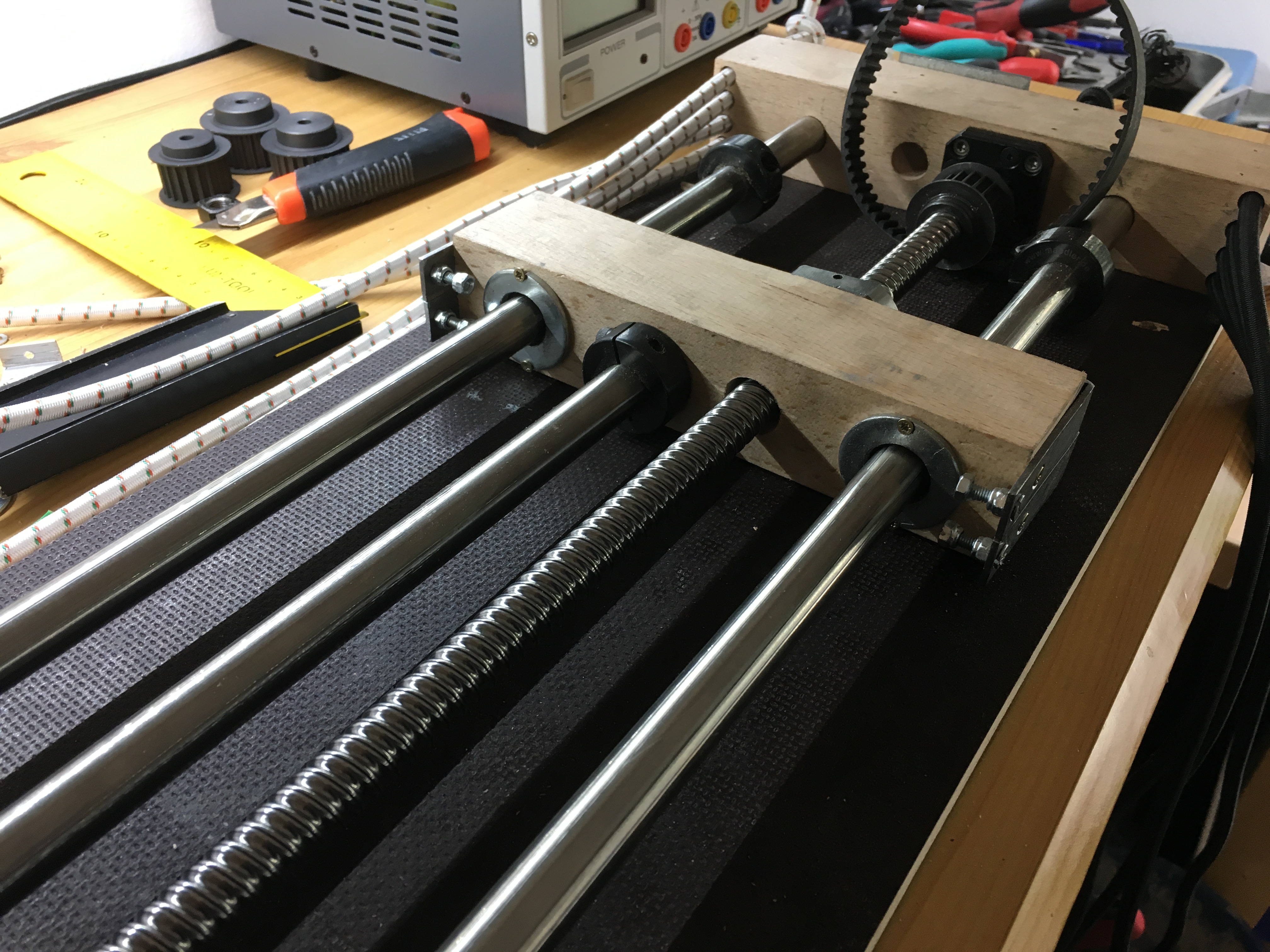
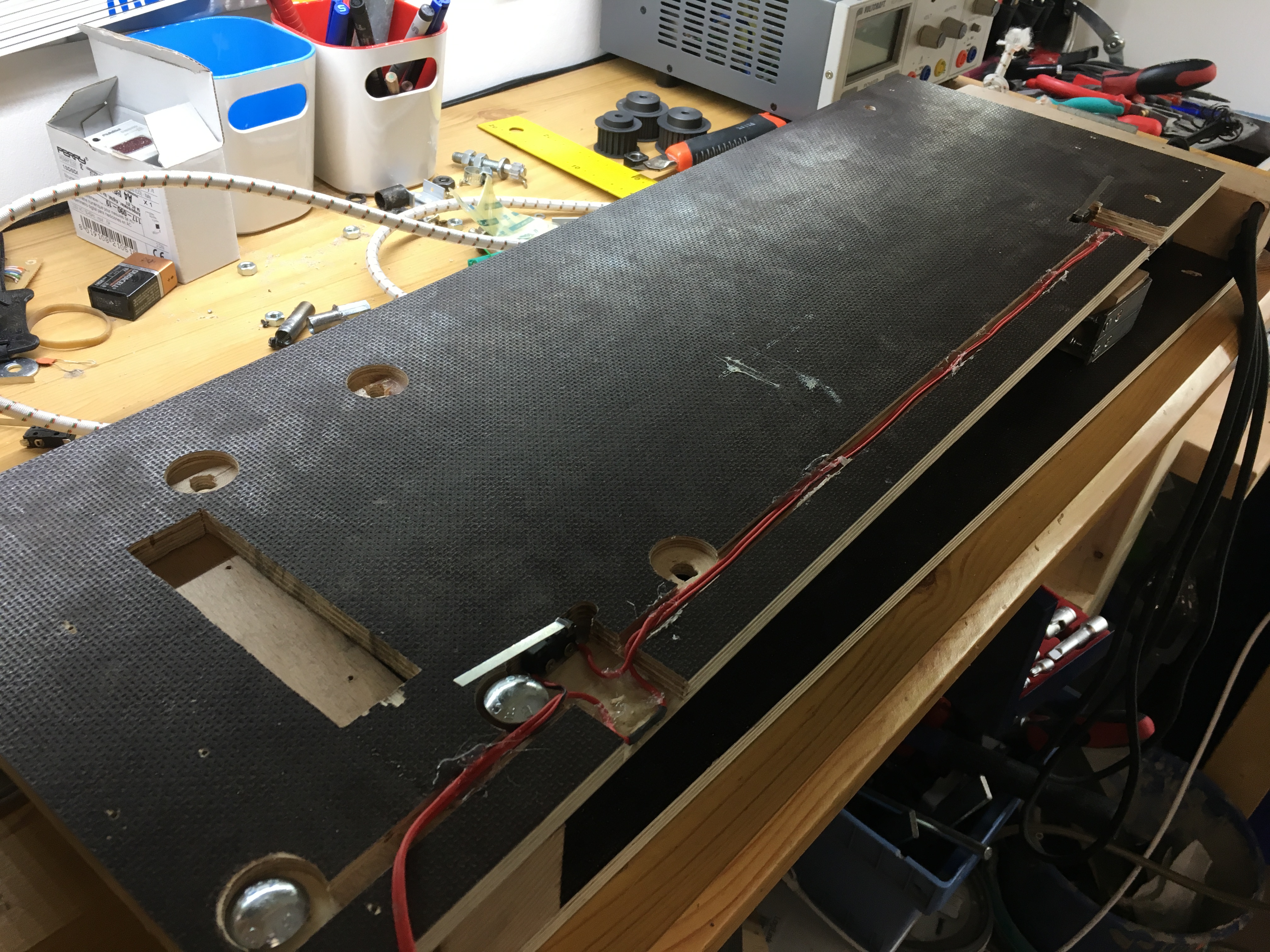
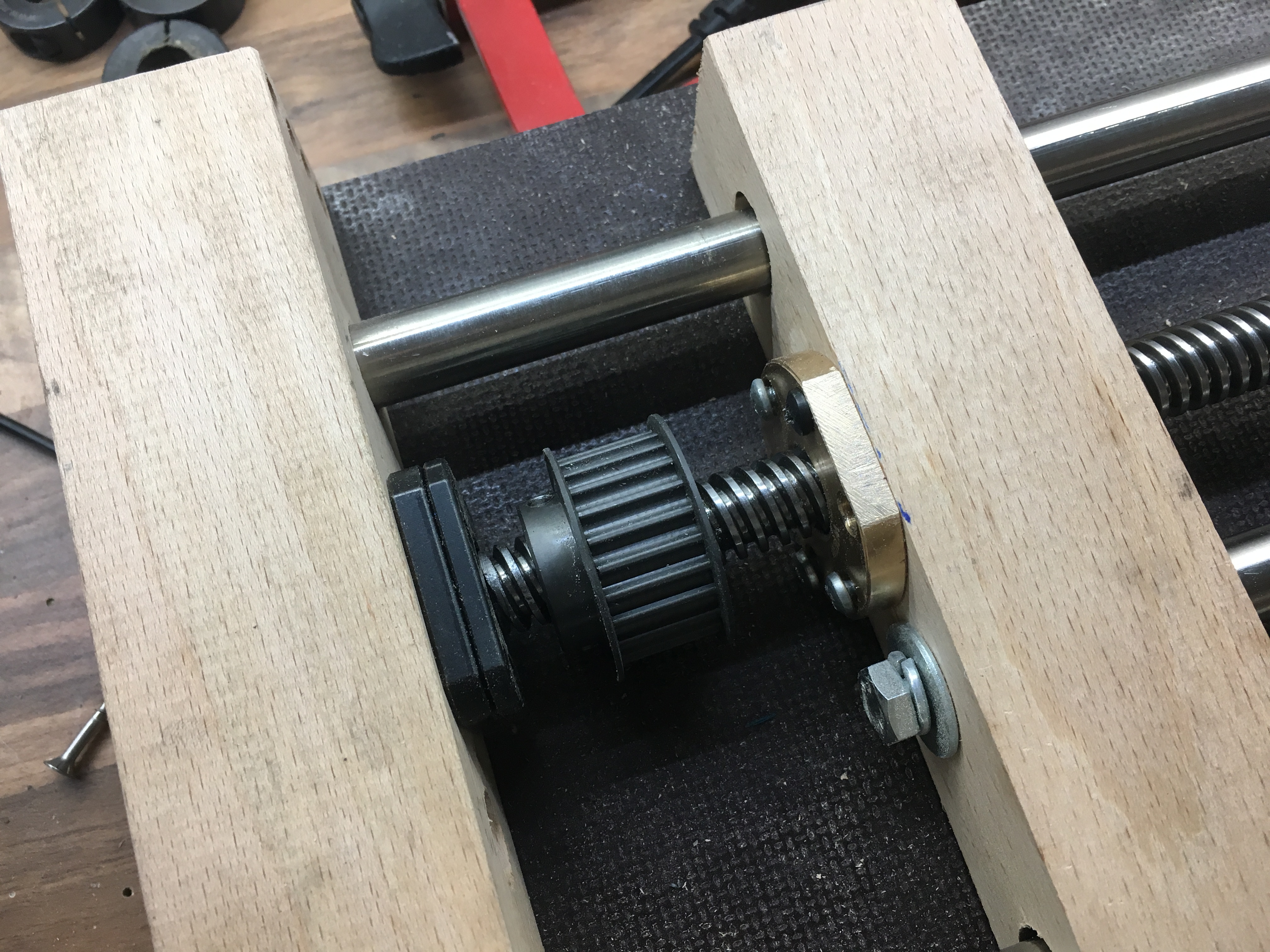
Upgrade to spindle actuator: ball driven spindle. It still turns out that it is too loud and too slow in this version, so further improvement is needed:
Tests with a new kind of actuator, based on a spindle to move actuator. It turns out that it is too loud and too slow in this version, so further improvement is needed:
DCS Huey - Oculus Rift CV
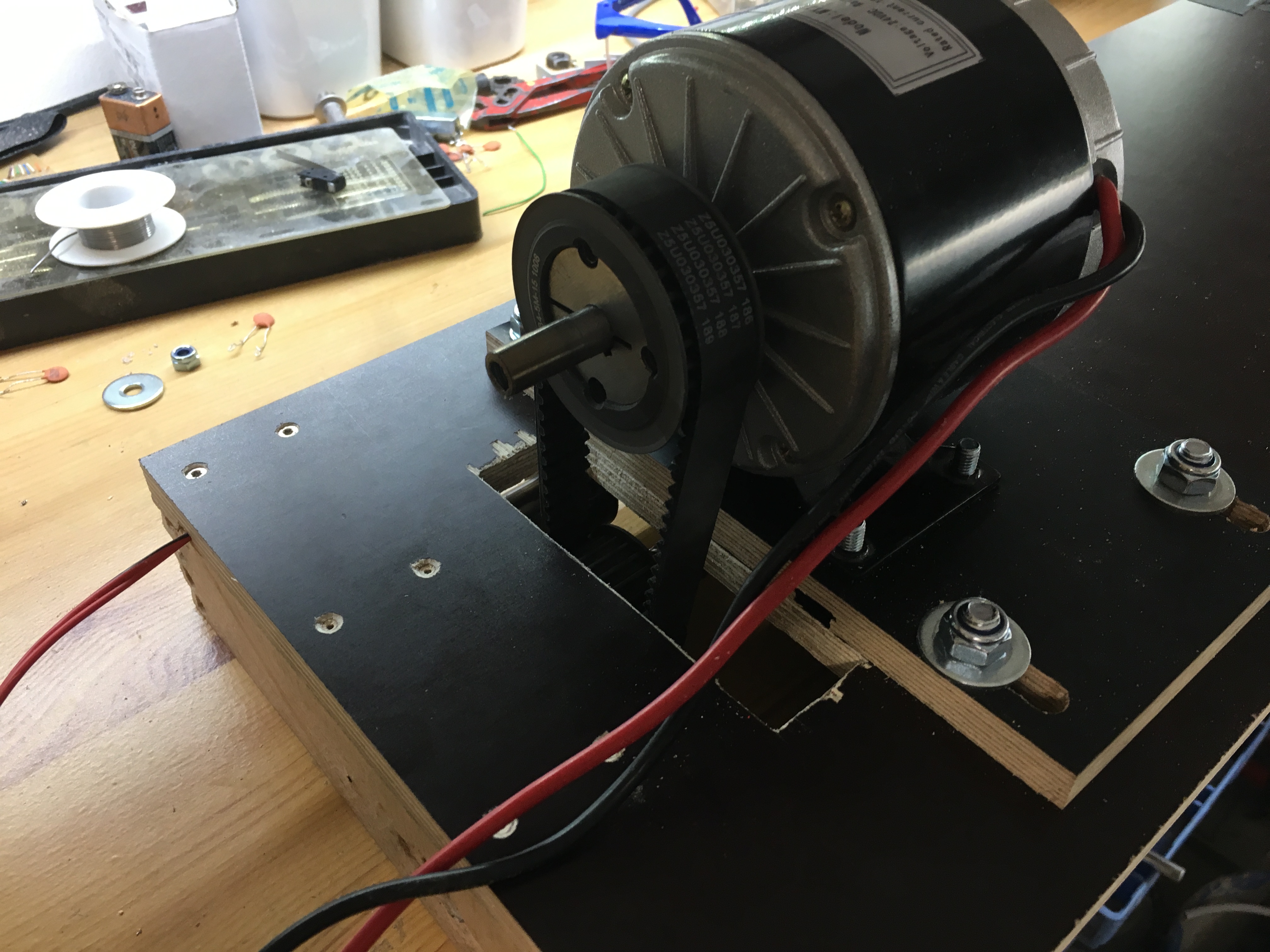
I just finished another new actuator and made two movies during the assembly.
Flyinside FSX - Oculus Rift CV - Saitek Controllers - VFR Flight to PHKO (Kona, Big Island, Hawaii) - DE Sabertooth, Thanos Board, BFF 6DOF, FSDT Hawaii Scenery, REX, FTX Global
Today i received the new 2016 thanos board. Will do tests over the next months.
Just finished the new actuator. You can find images here
Right now i am thinking about building new actuators. The old ones work quite well, but i want to improve them. I want to do some tests with belts and improve things which are not perfect (bungee turns, end-stop-switches, position feedback, belt/chain tensioner).
Flyinside FSX - Oculus Rift DK2 - Saitek Controllers - IFR Flight from PHTO (Hilo, Big Island, Hawaii) to PHNL (Honolulu, Oahu, Hawaii) - DE Sabertooth, Thanos Board, BFF 6DOF, FSDT Hawaii Scenery
Thanos-board-housing with sabertooth-controllers. Over the last few weeks i did some tests with the thanos-board and the new 2.0 release. To do this i installed the thanos-board with new sabertooth-controllers in a new housing. It seems to run better (and without noise) than the previous versions.
Over the last months i flyed from the us-west to the east-coast and made aproximately 25 landings and starts without problems. Platform seems to be stable.
Flyinside FSX Beta - Oculus Rift DK2 - Saitek Controllers - Flight from PHOG (Maui, Hawaii) to PHTO (Hilo, Big Island, Hawaii) - DE Sabertooth, DE Kangaroos, BFF 6DOF
Flyinside FSX Alpha - Oculus Rift DK2 - Saitek Controllers - Demo Flight over Hawaii - DE Sabertooth, DE Kangaroos, BFF 6DOF
Saitek Cockpit Installation and resized upper triangle
Redesigned upper connectors between actuator and upper triangle
Prepare 3D - Oculus Rift DK2 - Saitek Controllers - Demo Flight over Hawaii - DE Sabertooth, DE Kangaroos, BFF 6DOF
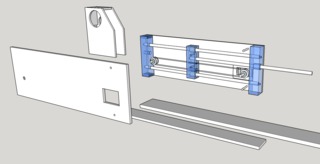
SketchUP/SketchyPhysics 6DOF Platform movement demonstration
Prepare 3D - Oculus Rift DK2 Demo Flight over Hawaii - DE Sabertooth, DE Kangaroos, BFF 6DOF
FSX - Demo Flight over Hawaii (Bad Weather) - DE Sabertooth, DE Kangaroos, BFF 6DOF
FSX - Demo Flight over Hawaii - DE Sabertooth, DE Kangaroos, BFF 6DOF
FSX - Demo Flight over Hongkong - DE Sabertooth, DE Kangaroos, BFF 6DOF
Demonstration of the plaform movement capabilities - DE Sabertooth, Thanos 6DOF board, BFF 6DOF:
FSX - Tests with oculus rift on the platform - DE Sabertooth, Thanos 6DOF board, BFF 6DOF:
Conclusions:
Spindle Actuators are (at this moment) too loud and too slow.
The new belt-based actuators are more silent and do not get as warm as the older ones due to better bungee balancing.
Thanos board seems to work well now with the 2.0 software. (I like it more than the kangaroos, because it don't need a homing-procedure during startup. I also think the movement of the platform is little bit "smoother" than with the kangaroos. Also support in the motion-platform enviroment is better for the thanos board than for the kangaroos. But the Thanos-Board is more expensive than the kangaroos)
Did some tests with flyinside fsx. Immersion and performance is great. Please support this kickstarter-project.
One of the upper connector between actuator and upper triangle broke. I did a redesign of the upper actuator end to provide more stability.
I did a resize of the upper triangle to be able to install the saitek stuff.
The Platform is a little too small for the saitek pedals to fit, perhaps a resize of the base and upper triangle would be better.
The integrated Sensors of the DK2 seems to get confused by the movement of the platform, which causes the display to drift away from time to time. Not much, but noticeable.
DK2/P3D immersion is great. Its really fun to fly with this setup. However, you can still see the pixels of the FullHD-DK2, so i am looking forward for the consumer version. But for a 4K/8K Setup more computation power is needed.
use short cables. Long cables can cause vibrations.
use chain tensioners. Chain can get loose from time to time.
fix bearings. They can get loose from time to time.
when you start limit the motor power to eg. 50% power
use sabertooth/kangaroo exponential response
use no analog devices, as they could pick up noise